SCUBAssist - Senior Design Project
|
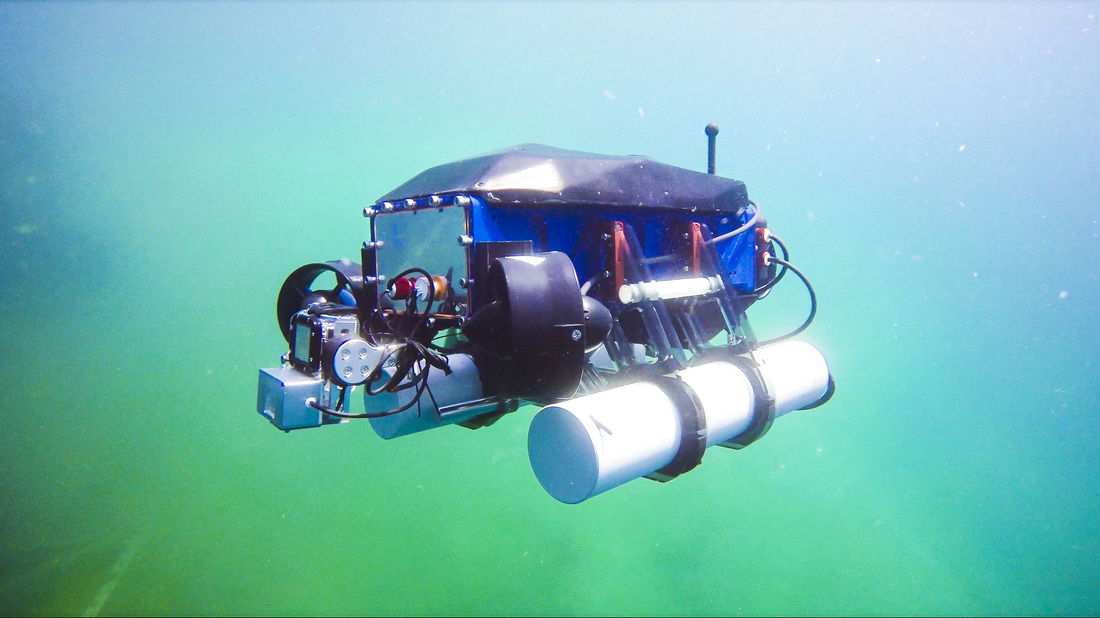
SCUBAssist is a semi-autonomous underwater vehicle that aims to be the ultimate recreational SCUBA diving assistant. It does this by both assisting with dive site scouting via tethered remote control and by following divers semi-autonomously to record well-framed and stabilized video of the dive. Awards:
First Place: Intel Cornell Cup Second Place: UPenn SEAS Design Competition Francis G. Tatnall Prize |



Diver Tracking
|
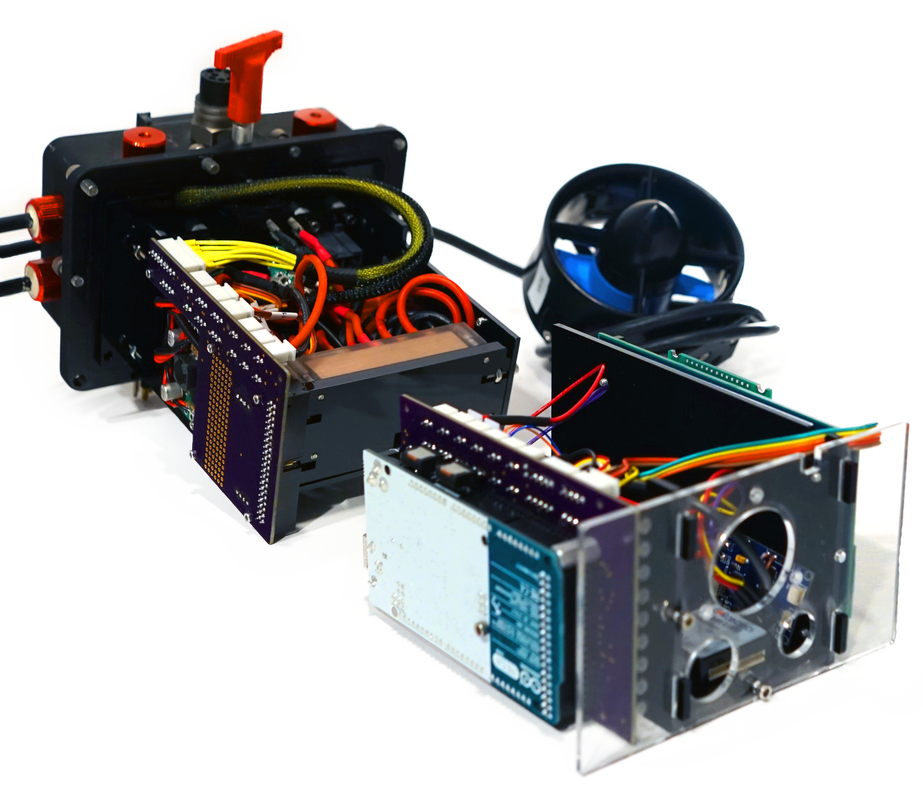
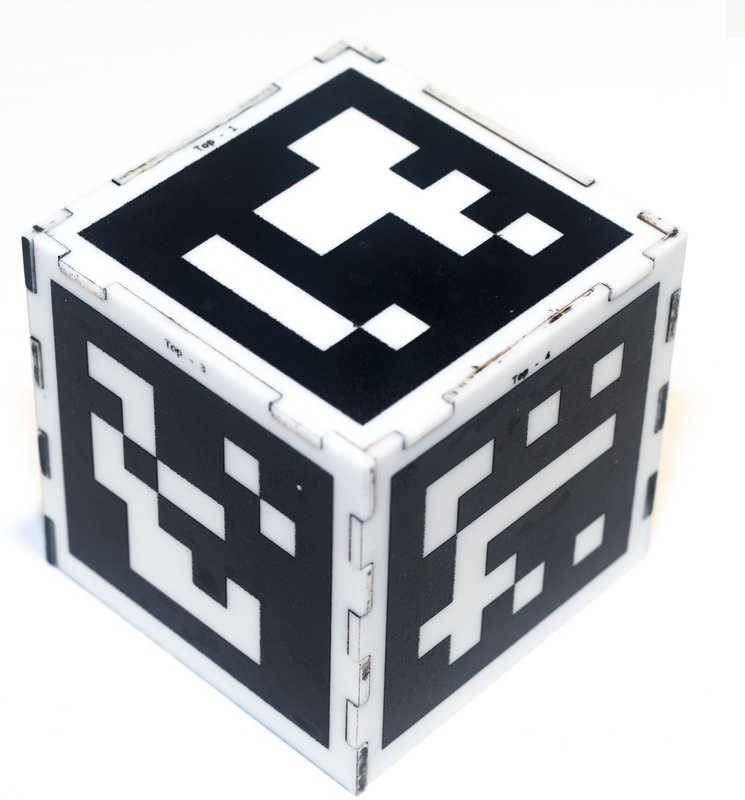
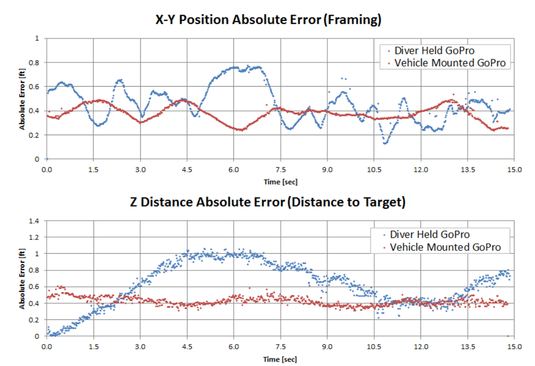
The vehicle had an on-board processor called an Intel Edision which leveraged OpenCV libraries to track this fiducial target using a webcam. By calculating the relative position of the target to the vehicle, it could autonomously servo itself to the movements of the diver. We were able to show that with closed loop control, that the vehicle was able to capture better video than what a diver held camera could.
|
|
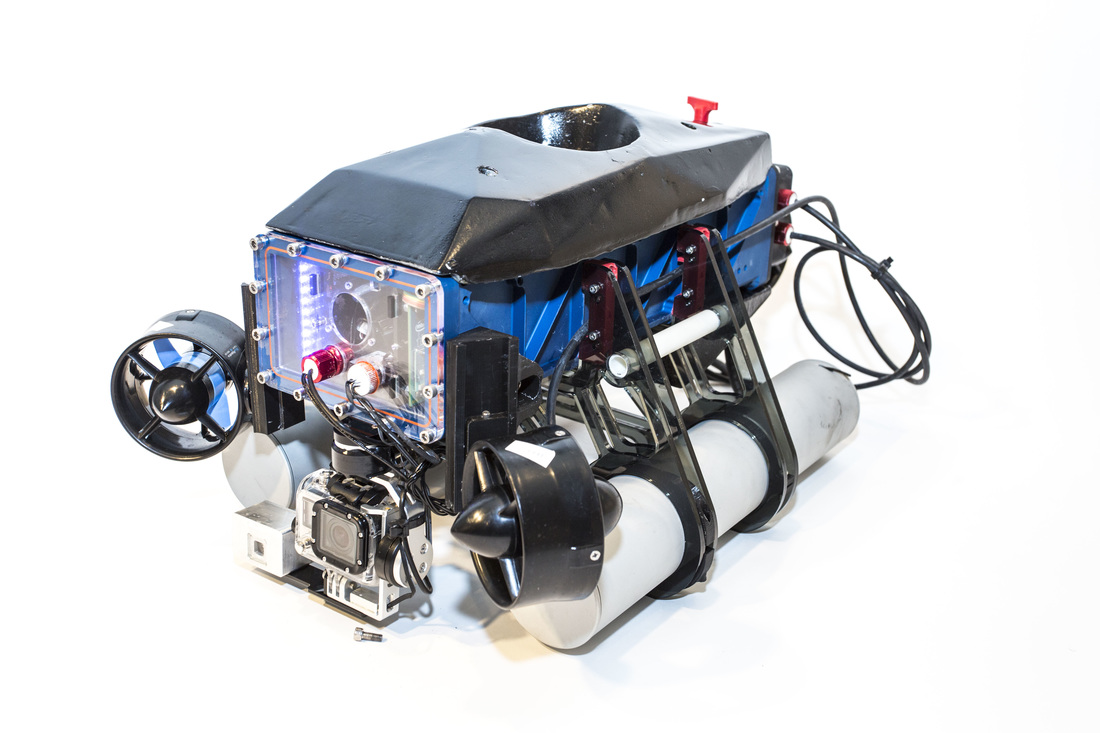
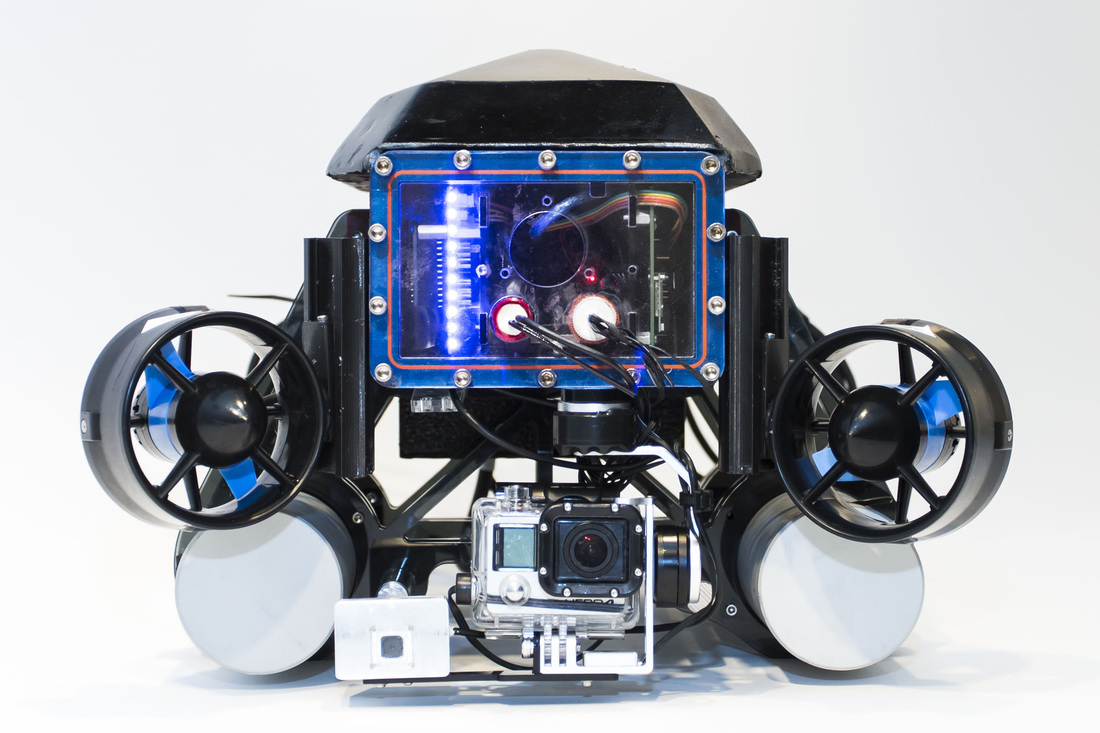
Vehicle Design
|
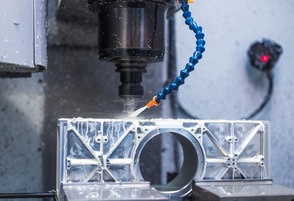
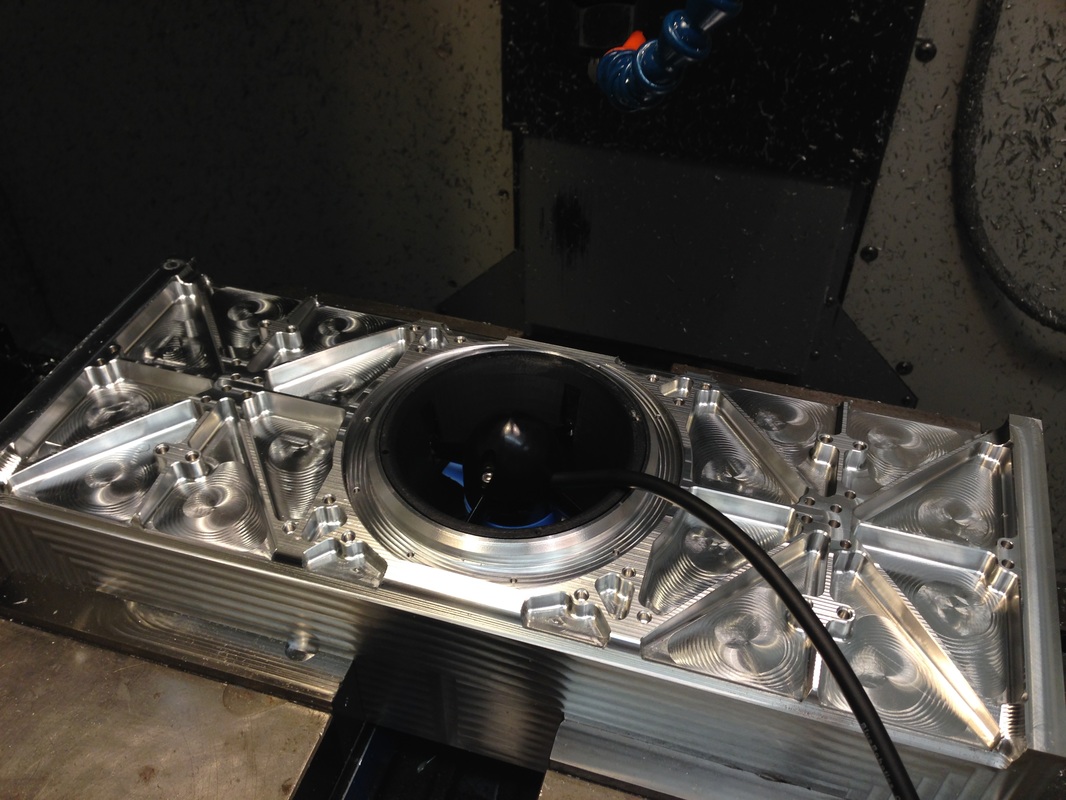
The team has designed, developed, manufactured, and programmed the entire vehicle to robustly operate within typical recreational diving constraints. Specifically, the vehicle is rated to a depth of 120 feet, a dive time of 120 minutes, and weighs under 25lbs. The vehicle design goals and operation was validated through multiple test sessions in a pool and an open water
dive at a local dive site. |
|
