Robockey - MEAM 510

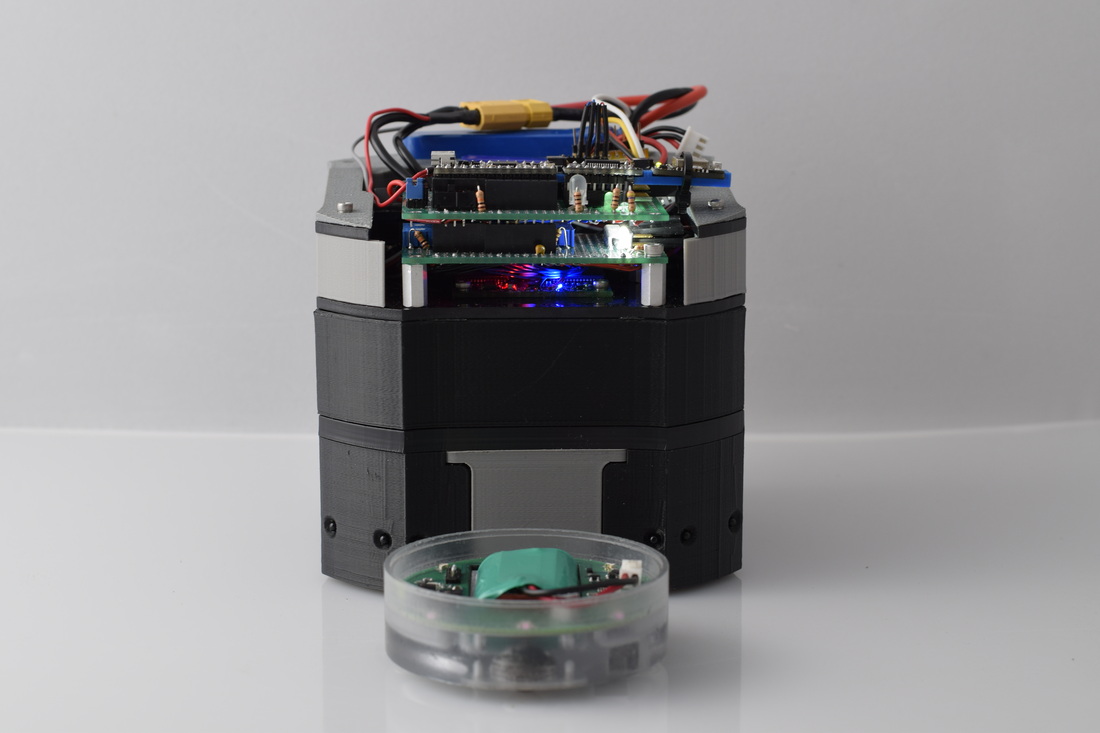
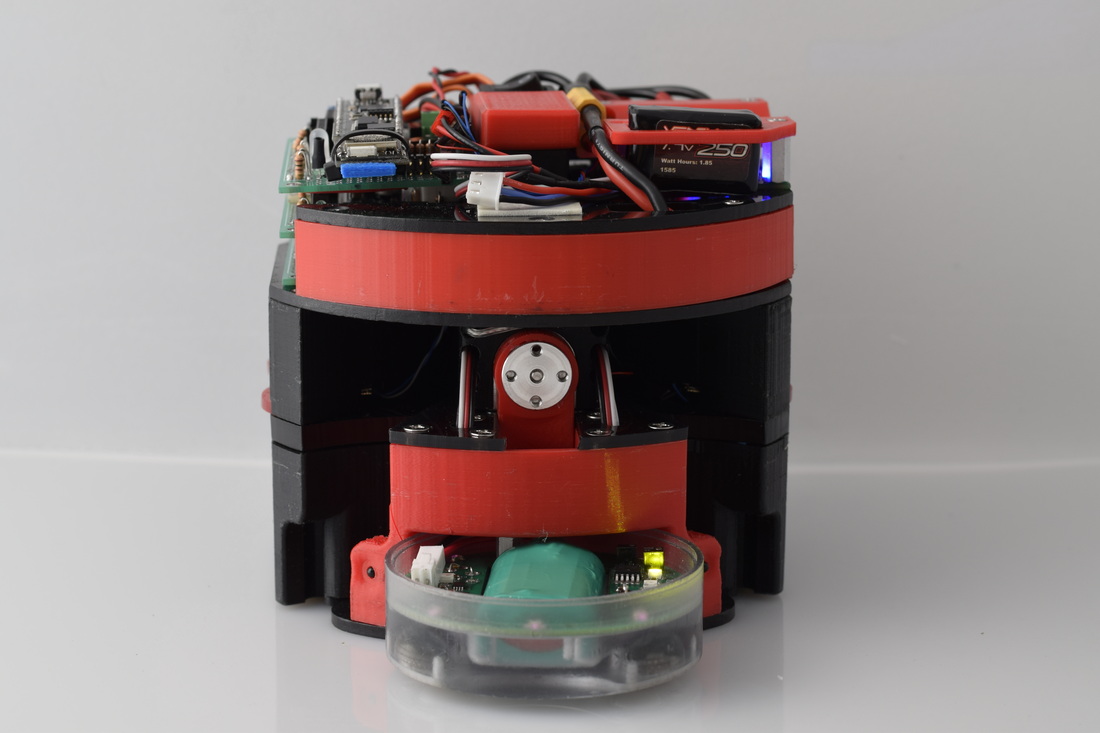
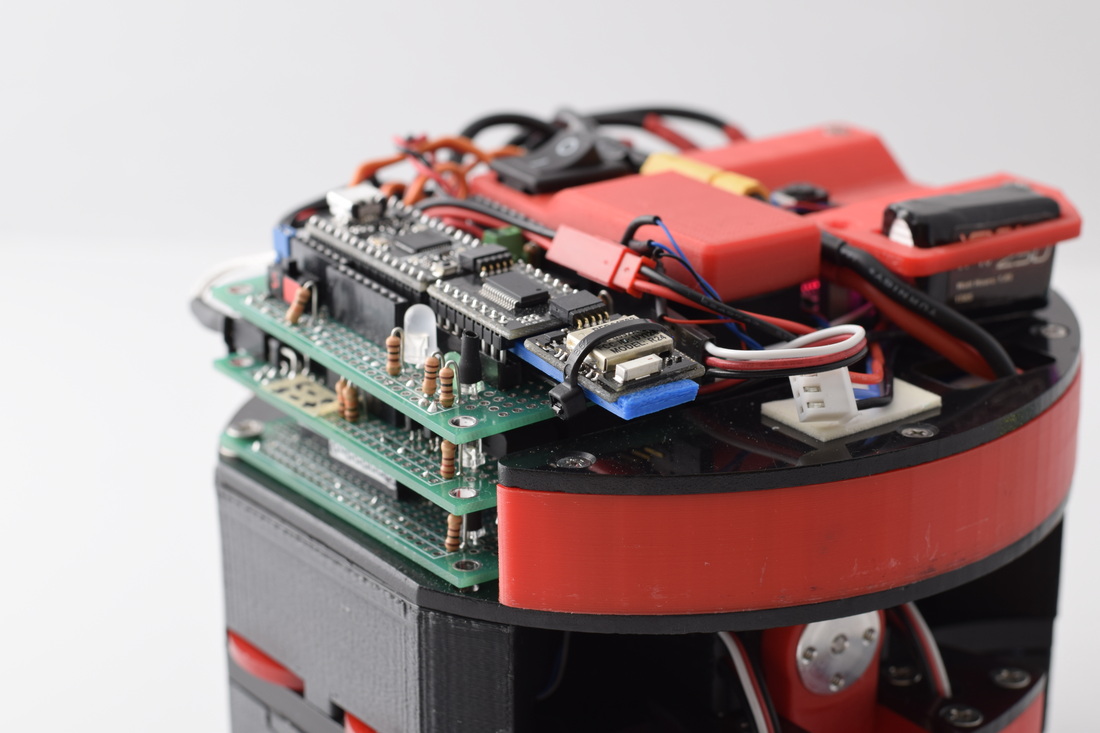
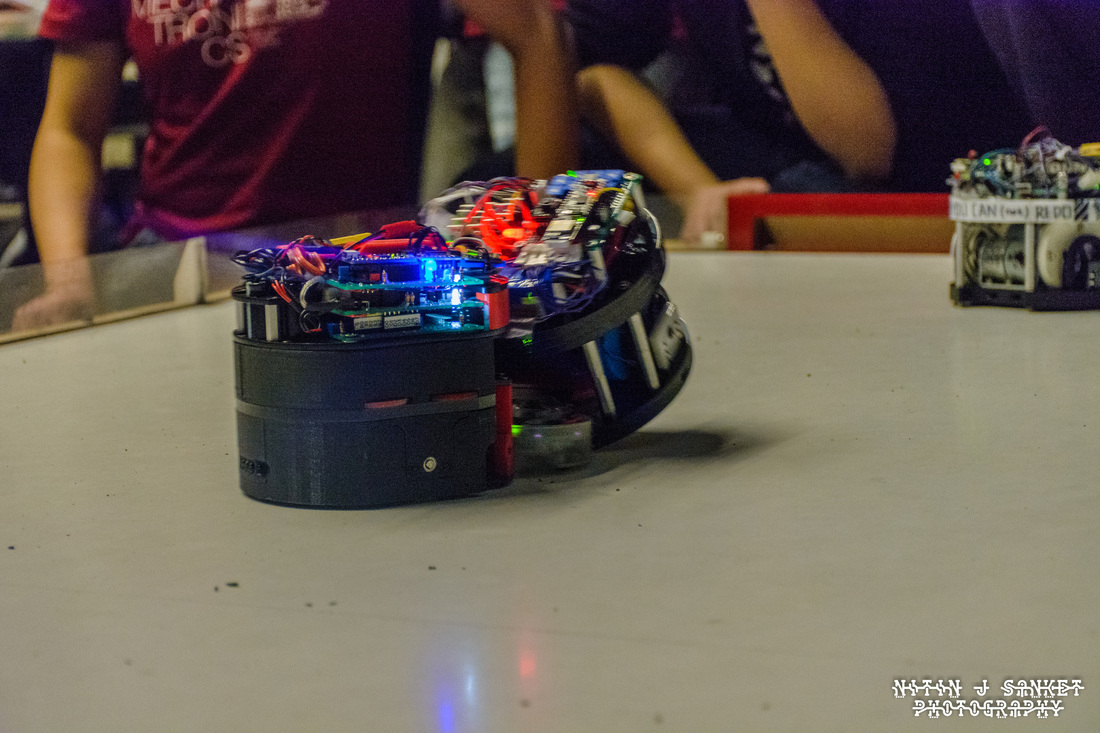
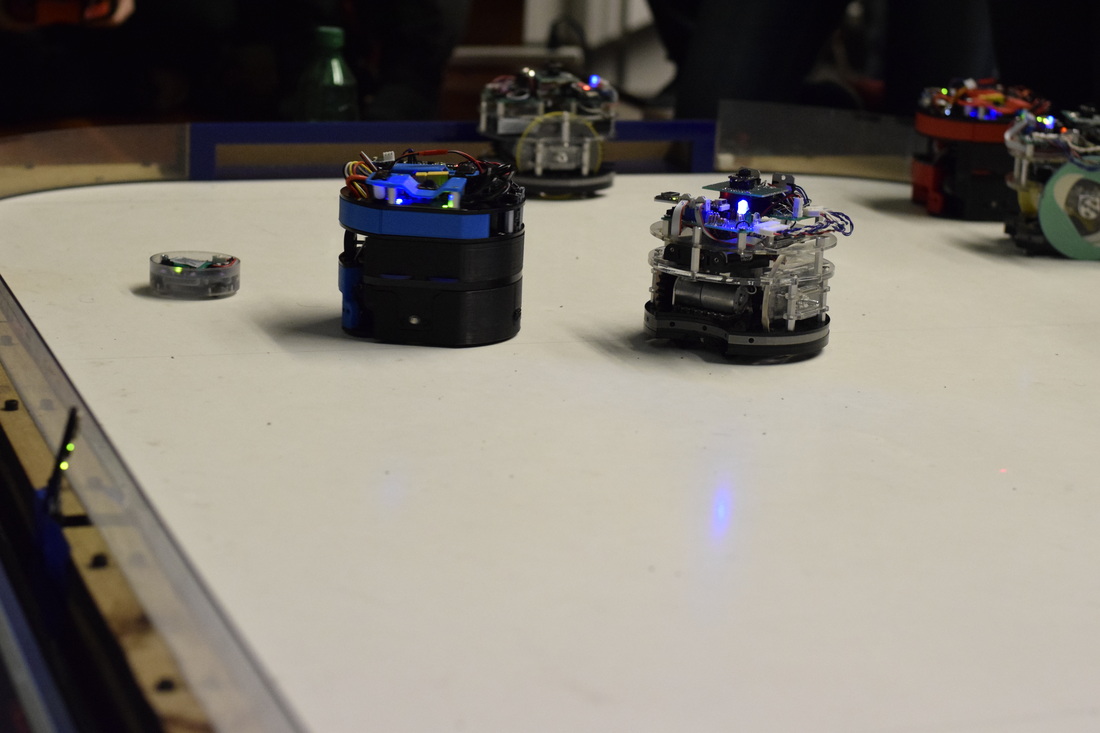
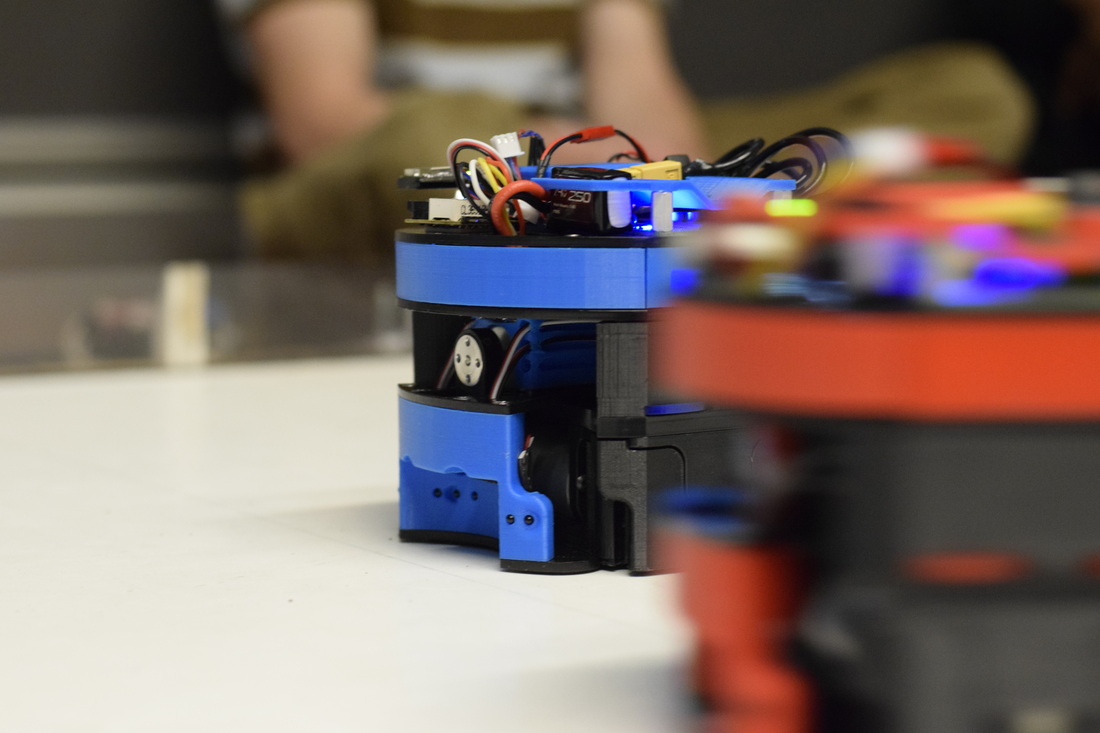
This was the final project in my mechatronics class. We had for weeks to design, build, wire, and program three robots to autonomously play hockey in a final competition. The hockey puck is specially designed to emit IR light such that the robots can detect it them with an array of phototransistors. To locate themselves in the field, teams are given cameras from Wii Remotes that can detect IR Light. A pattern or IR LEDs on the ceiling of the auditorium can be picked up by the camera. Using a little math, the robot can determine where it is in the field from the position of the pattern in the field of view.
On our team of 4 people, I was in charge of the mechanical design of the two main robots as well as the code to run them. I created libraries in C to handle wireless communications to the field as well as between robots, to communicate over the serial bus to the motor controllers, to determine the position of the puck, and fire the puck with an solenoid.
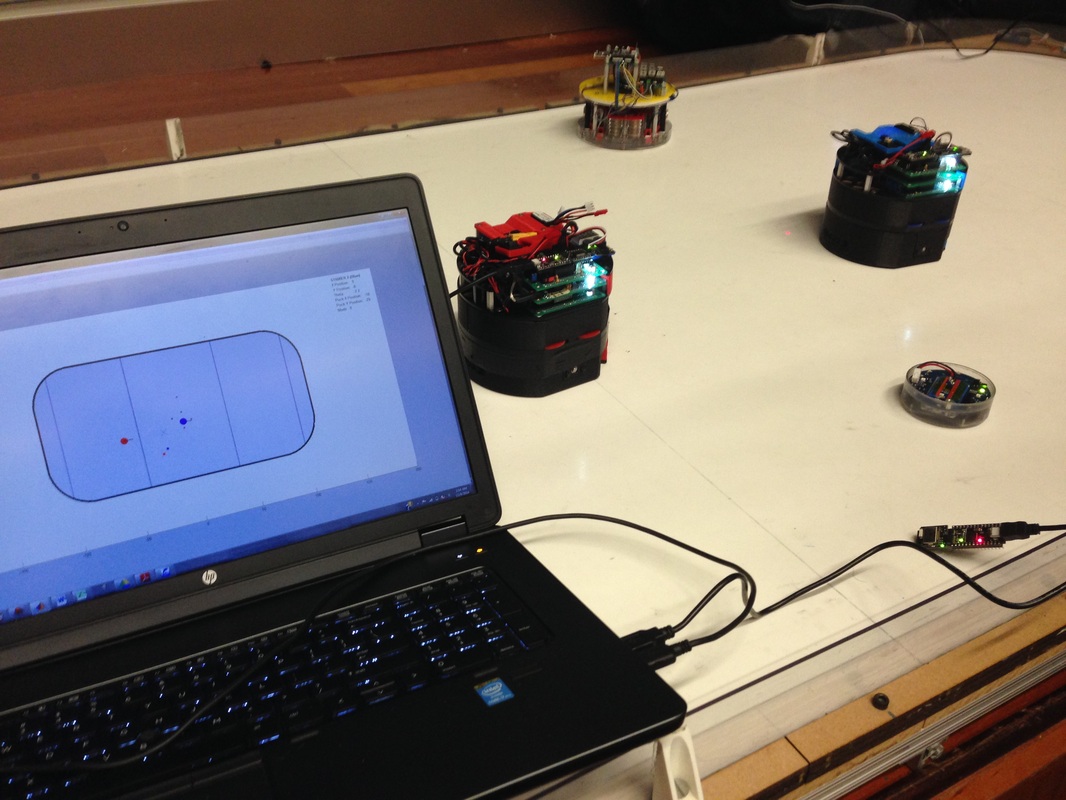
We also created tools debugging tools like the ones seen to the left. The robots broadcast a data wireless data that the computer can receive and display in a MATLAB interface. you can see in this picture the two robots' position on the field and each robots estimate of the puck. This was instrumental in debugging the complicated maneuvers and logic finding the puck.
On our team of 4 people, I was in charge of the mechanical design of the two main robots as well as the code to run them. I created libraries in C to handle wireless communications to the field as well as between robots, to communicate over the serial bus to the motor controllers, to determine the position of the puck, and fire the puck with an solenoid.
We also created tools debugging tools like the ones seen to the left. The robots broadcast a data wireless data that the computer can receive and display in a MATLAB interface. you can see in this picture the two robots' position on the field and each robots estimate of the puck. This was instrumental in debugging the complicated maneuvers and logic finding the puck.
|
|
A video of one of our matches. Our three robots start on the right.
|


|
|
I worked hard to put advanced software and strategy in the robot. One of these was a scheme to predict the X,Y position of the puck in the field, With this information the robot could plot a course behind the puck facing the goal. This was something that very few teams implemented and it helped us avoid scoring on ourselves.
|